
The control system of the V-2 rocket
Please, notice: do not multiply this webpage, as its purpose is meant for studying subjects only; as to avoid legal objections.
The German V-2 rocket developments might be compared with the American "Manhattan Project", in particular considering the financial implications.
The Germans could not rely upon existing technologies; therefore their challenges - were unique.
The main difference between the Manhattan project and the German V-2 (V1, HS 293, X-4,Wasserfall and R4 etc.) rocket projects, was, that the Manhattan project was decisive as to bring "World War Two" to an earlier conclusion.
But, it was already realised (understood) by those involved in "rocket projects", that the Germans possess an advanced science which was to be bridged within, say, twenty years.
That is why the first steps undertaken in the United States relied purely upon German technologies - thus actually rocket technology of the first half of the 1940s.
US "Operation Paperclip" - aimed to capture capable German technical- and intellectual brains.
Ultimately resulting in the successful US space projects- and the landing on the moon in 1969, with Werner von Braun and others being highly involved; neglecting here the down-sides of von Braun's (ethical) wartime past; but they were, for practical reasons, essential to the US aims - to express their superiority in space.
What should not be neglected, is: that the performance of the guiding system/technology constituted only one aspect of the successful operation of the V-2 rocket.
Though, another essential parameter was the performance of the propulsion technology. Which technology underwent also tremendous improvements, and, in particular, the way the many bottlenecks had been successfully challenged. Mainly a matter of smart and - sound - engineering. The amount of thrust of the system was an essential parameter making the V-2 missile a rather successful device.
For this occasion I would like, partially, to rely upon an unique contribution presented on the first "AGARD Conference held in Germany" in 1956*; where the Germans exploited the unique opportunity as to bring-in those whom, once, really had been involved in their "secret wartime rocketry projects".
This special occasion was: the new West-German membership to the NATO about this time.
It is not my aim to copy integrally, but now-and-then putting in additional information.
By no means what will follow - is easily to grasp - as we approach the subject from a - technical/theoretical/scientific point of view.
We will be confronted with, for instance, "gyros" types of superb performance; but these devices had to be invented/designed first, tested extensively and then produced in limited quantities; these aspects already being a huge challenge in the "German wartime economical environment".
It is evident: producing key technologies, without reference elsewhere in the world, must have constituted huge challenges.
I sadly miss the actual knowledge of these thrilling technical background aspects; though, I am fully aware of their tremendous essential implications.
Please notice that the system inside the V-2 rocket had to cope with magnitudes between Mach numbers 0 - 6.
It was expected that the V-2 has to be guided by a ground station; this fact miss-led the British enormously, and they did put-in considerable efforts, as to find "the way" - as so often before - to "jam" the V-2 guiding signals. Which, actually didn't existed at all!
All necessary flight parameters had, in fact, to be computed (instantly) somewhere inside the V-2 system.
* Once Dr. Phil Judkins gave me the book as a present.
I do prefer to keep the genuine wordings, though now-and-then adding the more common wording and information.
Page being initiated 11 August 2022
Current status: 16 August 2022
1
Chapter 2 (16 August 2022)
The Control System of the V-2
by Dr.-Ing. Otto Müller
1. The Control Problem and the required control circuits
The long range rocket V-2 was designed to transport its warhead to a target about 250 km away. It was to reach this target as an unpropelled projectile after the thrust had been cut-off. (then obeying to 'a ballistic body')
Simple calculations showed that the maximum that the maximum range for q given velocity at all-burnt was obtained with an angle of 49° between trajectory tangent and the vertical. Because of the starting weight of 12.5 tons, the normal type of inclined launching ramp would have been too heavy. Thus the rocket had to undergo a change of direction after launching; for this a control loop, the so-called pitch control, was required.
Furthermore, a control in yaw had to be incorporated, for without this the rocket would have deviated too much from its intended trajectory in the lateral direction. (please notice next drawing)
A third loop was required to suppress the natural tendency of the rocket to roll due to structural inaccuracies. It was not permissible to let the V-2 roll, as we shall see later, the control equipment contained gyros.
Fig. 1 The first part of the trajectory of the V-2
The order to obtain the desired range (up to 250 km), the thrust - after the end of the directional range - had to be cut off when the rocket had reached a predetermined velocity. For this purpose, a device had to be developed by which the velocity of the rocket could be measured and the fuel shut down, when the "all-burnt-velocity" had been reached (this would not imply that all fuel had been consumed) (please notice the next drawing).
2. The Control Equipment for the Standard series.
2.1 The Automatic Pilot for Yaw, Pitch and Roll
For the directional control of the rocket, the automatic pilot with gyros as used in aircraft readily suggested itself. (In contrast to the paper, I would like to suggest to consider, instead, Fig. 4 first) We shall consider the control in yaw used in the aircraft first. A potentiometer attached to a gyro produced a voltage proportional to the angle between the actual and intended direction of the axis. The voltage, via a stabilizing network and two amplifiers, operated a couple of servo units. (Fig.2) (AOB: as to understand first what the yaw and other parameters implies; please notice in particular the various axis concerned)

Fig. 4 Localisation of the vanes of the V-2
(the nucleus of the E and D axis constitutes the centre of gravity; please notice: that centre of gravity changes a bit, due to the boosted fuel consumption - thus owing to the controlled (predicted) loss of system weight)

Fig. 2 Scheme of the control in yaw
The particular difficulties in designing the control circuit were follows:
a) Only a velocity servo was available as a servo drive, since at that time it was used in aircraft.
b) The aerodynamic varied considerably during flight. The velocity of the rocket and the density of the air varied by several orders of the magnitude, and the distance between the centre of pressure and the centre of gravity by a factor of 10.
However, a solution was found, in which a passive network was used and the amplification as well as the transfer function of amplifier and network were kept constant from the start to all-burnt (this moment was not actually meaning that the liquid-tanks were emptied), this being extremely desirable for technical reasons. In order to avoid tedious repetition we shall consider at a later stage how this solution was found (technically solved).
The degree of feed-back was chosen so high that the control circuit was just sufficiently damped throughout the control time. This is not a priori the best solution: an accelerated unguided rocket veers (deviates) into the wind, whereas a guided rocket with a high degree of feed-back in its control drifts with the velocity component of the wind normal to the assigned trajectory. Therefore there is a certain degree of feed-back for which the wind has no influence on the lateral motion. Calculations, however, showed that for all disturbing forces occurring laterally, the accuracy in yaw best in the case of highest possible degree of feed-back in the control circuit.
Graphite controllers were used as control vanes in the (very high temperature) venturi with, for reasons to be explained later, small air-vanes in parallel. Controllers in the venturi were used for two reasons:
a) The relatively long time during which the rocket had to travel, because of its small initial acceleration, in order to develop at the air-vanes reaction forces sufficient to counterbalance wind and thrust unsymmetries (asymmetries), would have been sufficient to make the rocket turn through 90°.
b) The available hydraulic servo units were of rather low performance. It was therefore necessary to use well balanced controllers, i.e. of a type with a very small torque. It was not thought possible that within permissible time air-controllers could have been developed which, for the whole velocity range (Mach number 0 -6), would be sufficiently balanced.
(2) (16 August 2022)
After many trials, graphite controllers of such a shape were developed for use in the venturi that, in spite of loss through burning, equilibrium was sufficiently retained for the whole of the trajectory. One may say that the low performance of the servo units prevented the development of a really good yaw control circuit for the V-2.
The control in pitch was nearly identical with the control in yaw. Only the direction assigned to the roll axis (direction of course) was varied in time so that the desired direction of the trajectory and thus the desired change in direction was obtained. The direction of the course and the trajectory tangent were nearly identical in the case of the the V-2 control systems. For the chosen trajectory the angle of attack remained always smaller than 3°, and the angle between the axis of the rocket and its assigned direction never exceeded the same value because of the high degree of feed-back in the control circuit. the accurate calculation of the assigned direction from the desired trajectory tangent is not difficult.
In the first controlled rockets the direction of the course was changed by making the gyro presses by a signal (the precession axis was called D-axis, see fig.4). The direction of the course was the direction of the spin axis of the gyro (see Fig. 4). later on, the pick-off pitch was given as an angular deviation with respect to the rocket; in the method, which yields better results, the direction of the course differs from the axis of the gyro by this angular deviation.
The control circuit for roll was identical with the control in yaw up to the amplifier input, only the network was somewhat different. The output voltage of the network was fed into both amplifiers for yaw control, from which one feed line passed through a phase-inverter. The roll signal thus operated the yaw controllers in phase opposition. We now understand the purpose of the small additional air controllers; because of their small leverage about the longitudinal axis the effectiveness of the controllers in the venturi was not sufficient to counterbalance the moments in roll. It was found that even the additional air controllers had insufficient effect. Therefore a so-called "Trimmsegelsteuerung" was built into the tail plane which, by way of a control circuit making use of integrated deviation, compensated continuous disturbances in roll. Fig. 3 shows a circuit diagram of the direction and roll control circuit. We see that a gyro, a so-called "Vertikant", carried the yaw and roll pick-offs; the amplifiers and networks were conbined in the so-called mixer unit (summing amplifier (called: Mischgerät)
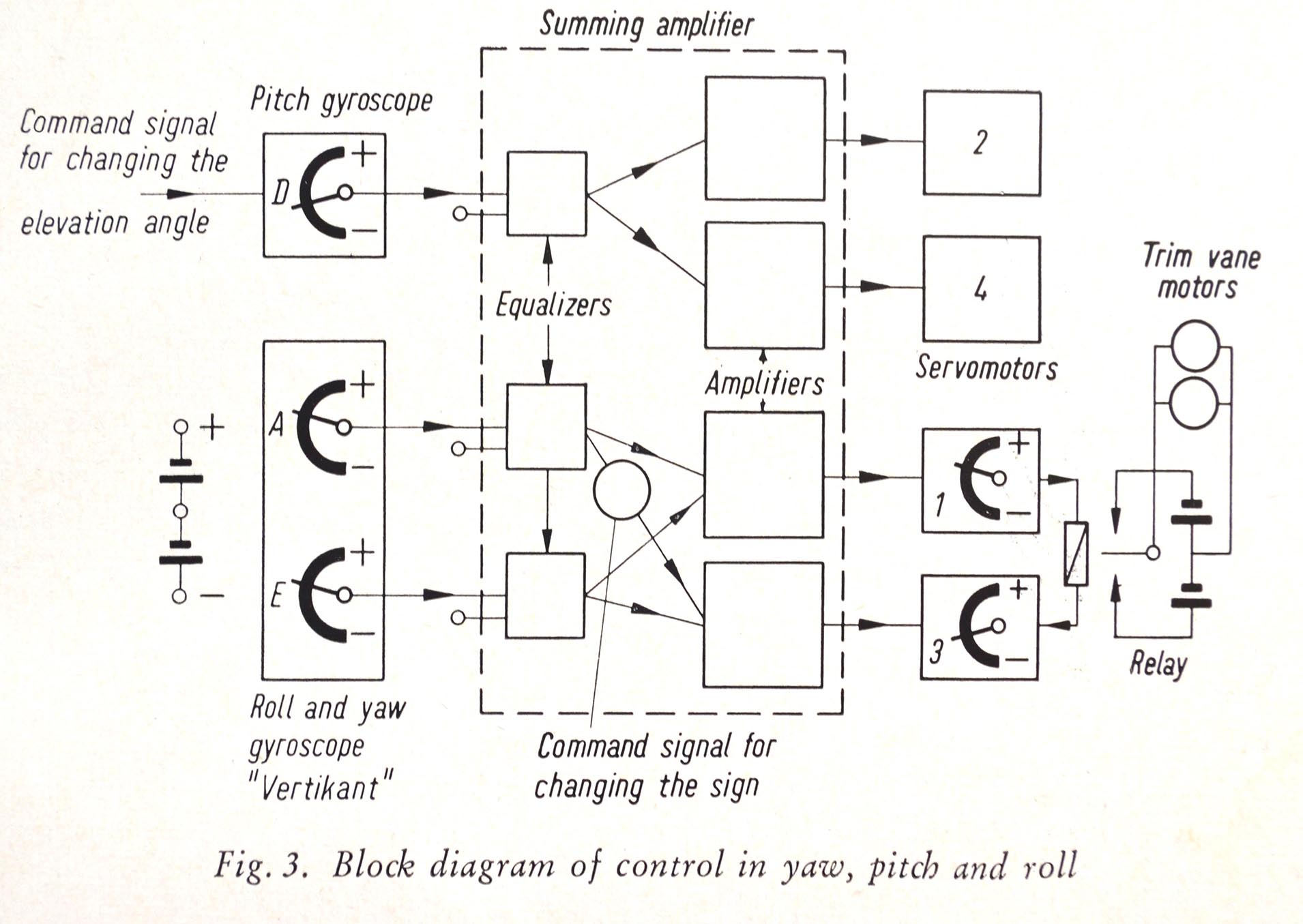
Fig. 3. Block diagram of control in yaw, pitch and roll
AOB: the controls were actually ring-modulators which being fed from a three-phase 500 Hz generator. Allowing a quasi powerless linear voltages controlling. Archive_3_display_5.htm

Viewing it from below

Viewing it from above
Please be aware, that the second unit being removed and, consequently only a single section is remaining
The Mischgreät had been designed at Peenemünde, by Helmut Hoelzer, whom after the war became engaged in the US Space Science, albeit in the field Mathematics as a director of an US Space Institute
Mrs. Busjahn published also an interesting paper:
https://www.cdvandt.org/Busjahn_Analogcomputer.pdf
Let us please bear in mind, that whatever some papers tells you, that nonetheless provisions for eventually radio-guiding was foreseen, though, that operationally the V-2s fired on Britain and elsewhere were not equipped with wireless guidance provisions!
Fig. 4. Location of the vanes of the V-2
Fig. 4 shows the arrangement of the control vanes. The functioning of the trim vanes destabilizes the control in roll, but only to a permissible degree.
Special care has to be taken with regard to the correct position of the assigned course during launching and flight. In order to satisfy the first condition, the gyros were mounted on a kind of adjustable platform. The rocket was adjusted so that the platform was in a horizontal position, and one of its edges pointed towards the target (optical adjustment by collimator) see Fig. 5. To make sure of the second condition gyros were used, which in the laboratory did not wander more than 0.1 to 0.2 degrees per minute under the influence of gravity. (AOB: gyros tend to reach the centre of the earth rotation, phenomenon known as precession)

Fig. 5. Arrangement of the gyroscope in the missile (upper section)
2.2 Fuel control
2.2.1 General
For the range of the rocket we have as first approximation
(2.1) X = ƒ(v1) (v1 = fuel cut-off or all-burnt velocity) (this doesn't imply that the fuel tanks were empty).
The fuel cut-off unit had to shut down the fuel supply when the rocket had reached the velocity assigned v1 *. It consisted as is shown in Fig. 6 of,
a) a device for measuring the rocket velocity, furnishing a quantity B proportional too this velocity near the cut-off point.

Fig. 6. Block diagram of the device for propulsion cut-off
b) a device (comparator) releasing a signal when B exceeded a predetermined quantity A1;
c) a relay operated by this signal which shut down the supply of fuel to the combustion chamber.
If the velocity measuring equipment was stationed on the ground (not actually maintained) an additional radio transmitter unit was required.
The quantity A is approximately to the all-burnt velocity v1 *. However, since the rocket velocity still increases in the time between the response of the comparator and the complete cessation of combustion. A was actually chosen to be proportional to a velocity which was smaller than the all-burnt velocity assigned by mean of value Δ v1 * of this increase Δ v1. Since the variance of Δ v1 was relatively large, Δ v1 was reduced by reducing the thrust immediately before cut-off in the ratio 4 : 1. This reduced a thrust-time curve as shown in Fig. 7. Further corrections of A will be discussed later.

Fig. 7. Thrust at cut-off Hatched area = velocity increase Δ v1
AOB skipping the section dedicated to radio control; as it wasn't operationally maintained.
4. High Precision Control Without Radio
4.1. Description
The integration units had been developed for a V-2-control without radio. But a combination of the described system with a fuel cut-off unit containing an integrator fixed to the rocket axis could not be expected to produce good accuracy, for the following reasons:
a) The gyros pressed too much under the influence of the considerable accelerators.
b) The integration of the axial acceleration, and the use of the integrated value for the cut-off signal is, as we have seen, not very advantageous. - More over, we had no idea how to supplement this control system by an additional lateral guidance.
In order to remedy this, the following control system without radio was developed: A stabilized platform in Cardan suspension was built into the rocket. By means of three gyros this platform did not alter its direction in space. The angles between the three rocket axes and the platform were used as control quantities for the automatic pilot. Such a platform has a much better stability than a single gyro.
The pick-up of the integrator was mounted on this platform in such a way as to measure the component of the rocket acceleration in the direction a, which was used as measuring direction for the measurement of the rocket velocity by radio. Thus the determination of the fuel cut-off time by means of the integrator becomes theoretically equivalent to its determination by means of radio measurement. Only objection: the term for the correction of gravity which takes the form of
(4.1) Vg = g cos a ∙ t1*
is exact only if the time t1* used in the calculation.
For additional lateral guidance - substitute for guide-plane control - a so-called lateral integrator was developed. An acceleration pick-up was mounted on the stabilised platform in such a way as to measure the acceleration perpendicular to the plane of the trajectory. The pick-up produced a current proportional to this acceleration. A network which in principle performed a double integration of this current yielded the expression
(4.2) b0z (1+b10 p)
which was used for the control instead of the guide-plane signal. It was not intended to use an integral signal for the time being. The probable error of the firings without additional guidance (only a limited number was available) amounted to
x50 = ± 3.4 km,
z50 = ± 2.7 km.
These rockets, were equipped with the electronic integrator. The additional lateral guidance by means of the lateral integrator could only be tried once. The result was lateral deviation of 0.5 km.
4.2. Principle of Stabilized Platform and Lateral Integrator
Fig 16 is a basic diagram of the stabilized platform. Each of the three gyros has one degree of freedom. If, due to a rotation of the Cardan suspension, a friction torque becomes effective, the respective gyro begins to precess and and exerts on the platform a torque of equal magnitude in the opposite direction.

Fig. 16. Sketch of the stabilized platform
The platform retains its direction in space. If the gyro has precessed through a certain angle it closes a contact supplying current to the respective supporting motor. This motor then exerts a torque on the platform greater than the possible friction torque. The gyro begins to vibrate around its precession axis. The platform too vibrates somewhat, but the amplitude of its vibration is negligibly small. For good stability of the platform it is essential that the gyros have very little friction about their precession axis.
The change of direction in pitch was carried out as follows: a motor rotated the platform relative to the outer casing of its needle bearings. Naturally, the Cardan suspension ring rotates and not the platform. The potentiometer D (please notice Fig. 3 and Fig. 4) supplies a voltage to the servo-units and the rocket changes its direction until the original constellation of longitudinal axis of the rocket and the Cardan suspension ring has been restored.
The simple co-ordination of the gyro and supporting motor on which our description is based, no longer holds in the case of changes in direction, but this is not a fundamental difficulty.

Fig. 17. The device for integrating the acceleration in yaw: sketch of the measuring head; principle of the bridge network
Fig. 17 shows the lateral integrator. A moving coil which dips into a magnet - the system was similar to a permanent dynamic loudspeaker - was built into the zero branch line of an emergency bridge circuit. Between the opposite points of the bridge and the moving coil is a network. One of the branches of the bridge is replaced by a switch which opens (Contacts c c) if the depth of the moving coil in the magnet exceeds a certain value. If the apparatus is switched on the coil vibrates with a relatively high frequency about the position thus deternined. The mean value of the current in the coil is proportunal to the acceleration exerted on the coil in the direction of its axis. Its polarity changes with the direction of the acceleration i1 ~ d2z/d t2.
The voltage at the terminals a a of the network is (4.3) and (4.4)

The voltage U2 thus contains a component proportional to z and another proportional to d z/dt. A signal was obtained similar to the one supplied by guide-plane receiver, feeding U2 into an amplifier whose gain was varied by means of a cam shaft driven potentiometer (notice in Fig. 16 the numbers 16 and 17). The output voltage of the amplifier was fed into the mixer unit (Mischgerät).
A moving coil system pick-up would have given too large a system error.
A component of the longitudinal acceleration proportional to the angle of deflection would have been included in the measurement. If a system had been chosen which avoided the vibration of the moving coil, friction would have been intolerable.
AOB, I would like to terminate here, as the essentials had been dealt with.
By Arthur O. Bauer
![]()